
04 Feb Fraunhofer IAF: Innovative Sensorlösung für Cobots – sichere Mensch-Roboter-Kollaboration dank Radar
Ein Durchbruch in der kollaborativen Robotik rückt dank eines Kooperationsprojekts, koordiniert durch das Fraunhofer IAF, in greifbare Nähe. In dem Projekt »RoKoRa – Sichere Mensch-Roboter-Kollaboration mithilfe hochauflösender Radare« ist es Forschern gelungen, eine innovative Radartechnologie zu entwickeln, die als Enabling Technologie eine funktionale Sicherheit bei verschiedenen, auch leistungsstarken, Robotersystemen und -anwendungen ermöglichen kann.
Mit dem Ziel der sicheren Mensch-Roboter-Kollaboration (MRK) hat das Fraunhofer-Institut für Angewandte Festkörperphysik IAF gemeinsam mit sechs Partnern 2017 das Projekt »RoKoRa – Sichere Mensch-Roboter-Kollaboration mithilfe hochauflösender Radare« ins Leben gerufen. Seitdem gab es viel Bewegung im MRK-Markt und obwohl sich ein großes Angebot an kollaborativen Robotern, sogenannten Cobots, entwickelt hat, blieb der große Durchbruch bislang aus. Der Grund sind die Sicherheitsbestimmungen, die es performanten Robotern nicht einfach machen und von gängigen Sensorlösungen nur unter großen Effizienzeinbußen befolgt werden können. Beim erfolgreichen Projektabschluss von »RoKoRa« im Dezember 2020 wurde eine kontaktlose 3D-Sensorlösung demonstriert, die nun einen Durchbruch in der MRK herbeiführen könnte. Sie verspricht als Enabling-Technologie enorme Fortschritte sowohl in der industriellen Cobot-Technologie als auch in der Service-Robotik.
Radarüberwachung des Kollaborationsraums
Aufgrund der hohen Anforderungen an die Sicherheit des Menschen kommen bislang meist nur Leichtbauroboter in der MRK zum Einsatz. Diese sind aufgrund der aktuell verfügbaren Sensorlösungen auf eine Leistungs- und Kraftbegrenzung angewiesen. Damit MRK aber nicht nur sicher, sondern auch effizient wird, haben die Projektpartner von »RoKoRa« eine kontaktlose 3D-Sicherheitssensorik entwickelt, die im Vergleich zu herkömmlichen Sensorlösungen auf größere Distanz den gesamten Kollaborationsraum überwacht und eine dynamische Anpassung der Robotergeschwindigkeit und ‑bewegungsrichtung ermöglicht.
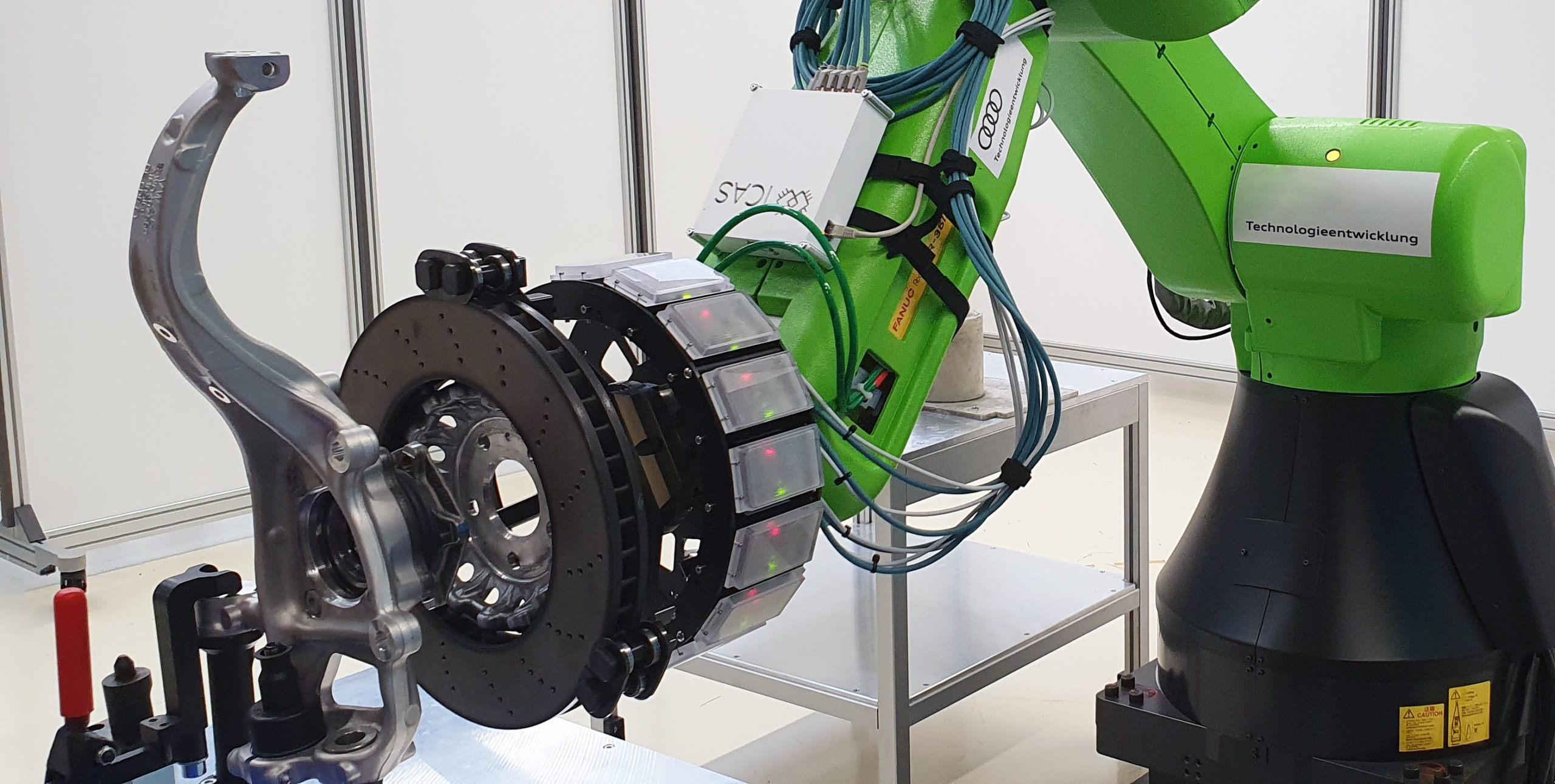
Der Demonstrator, der im Zuge von »RoKoRa« entstanden ist, zeigt einen Radarsensorring mit dazugehörigem Sensorknoten. Er erlaubt eine zuverlässige 360°-Distanzmessung selbst bei Dunst, Rauch, Staub und sonstigen optischen Einflüssen und kann sogar dielektrische Objekte durchdringen. Somit hat er nicht nur eine größere Messreichweite als gängige kapazitiven Sensoren, sondern auch eine erhöhte Robustheit im Vergleich zu optischen Alternativen. Darüber hinaus ermöglicht er auch erstmals großen und leistungsstarken Robotern mit höheren Nutzlasten in kürzeren Taktzeiten mit Menschen zu interagieren.
»Auf der Basis der Umgebungsmessung durch das Radar kann der optimierte Bewegungsablauf für den Roboter berechnet werden. Er kann sich berührungslos und dynamisch an die Interaktion mit dem Menschen anpassen«, erklärt Christian Zech, Projektkoordinator am Fraunhofer IAF. Der Sensorring kann potentiell als Plug & Play‑Lösung an jeder relevanten Roboterachse angebracht werden. In Verbindung mit einer Echtzeitauswertung ermöglicht er so eine sichere MRK bei nahezu allen Prozessabläufen und Interaktionen.
Sicherheit hat oberste Priorität
Einzigartig an dem Kooperationsprojekt war die frühe Verbindung der Sensorbauelemente mit realen Robotersystemtechnologien unter durchgängiger Berücksichtigung relevanter Sicherheitsaspekte auch auf Forschungsebene. Um dies zu gewährleisten, wurde das Projekt von dem industriellen Anwender AUDI AG, dem Roboterhersteller FANUC Deutschland GmbH sowie dem Institut für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung (DGUV) aktiv unterstützt.

Die innovative Sensorlösung von »RoKoRa« besteht aus 16 Radarmodulen, die jeweils aus einem 77 GHz Frontend des Fraunhofer IAF bestehen.
Das Projekt wurde vom Bundesministerium für Bildung und Forschung (BMBF) gefördert und bestand aus sieben Projektpartnern: das Fraunhofer-Institut für angewandte Festkörperphysik IAF, das Fraunhofer-Institut für Algorithmen und Wissenschaftliches Rechnen SCAI, die IMST GmbH, die Universität Kassel, die FANUC Deutschland GmbH, das Institut für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung e.V. (DGUV) und die AUDI AG.
Quelle und Fotos: https://www.iaf.fraunhofer.de

