
01 Apr. Roboter mit Durchblick
Forschende am Fraunhofer-Institut für Angewandte Optik und Feinmechanik IOF haben einen Sensor entwickelt, der transparente Objekte dreidimensional erfassen kann. Das System wurde nun erstmals erfolgreich in Verbindung mit einem Roboter getestet. Anwendungen sind speziell in großindustriellen Fertigungsprozessen wie etwa in der Halbleiter- oder Automobilbranche denkbar. Mit dem MWIR-3D-Sensor – auch Glass360Dgree genannt – lassen sich Elemente mit spiegelnden oder Licht absorbierenden Oberflächen erstmals zuverlässig räumlich erfassen. Zu diesem Zweck vereint das System Infrarot-Laserprojektion und Thermografie: Nachdem das Messobjekt gezielt lokal erwärmt wurde, ermitteln zwei Wärmebildkameras die auf der Objektoberfläche resultierende Temperaturverteilung. Anders als herkömmliche Sensoren erfordert das neu entwickelte System keine zusätzlichen Messhilfen oder spezielle, auf dem Objekt vorübergehend angebrachte Markierungen etwa in Form einer temporären Lackierung.
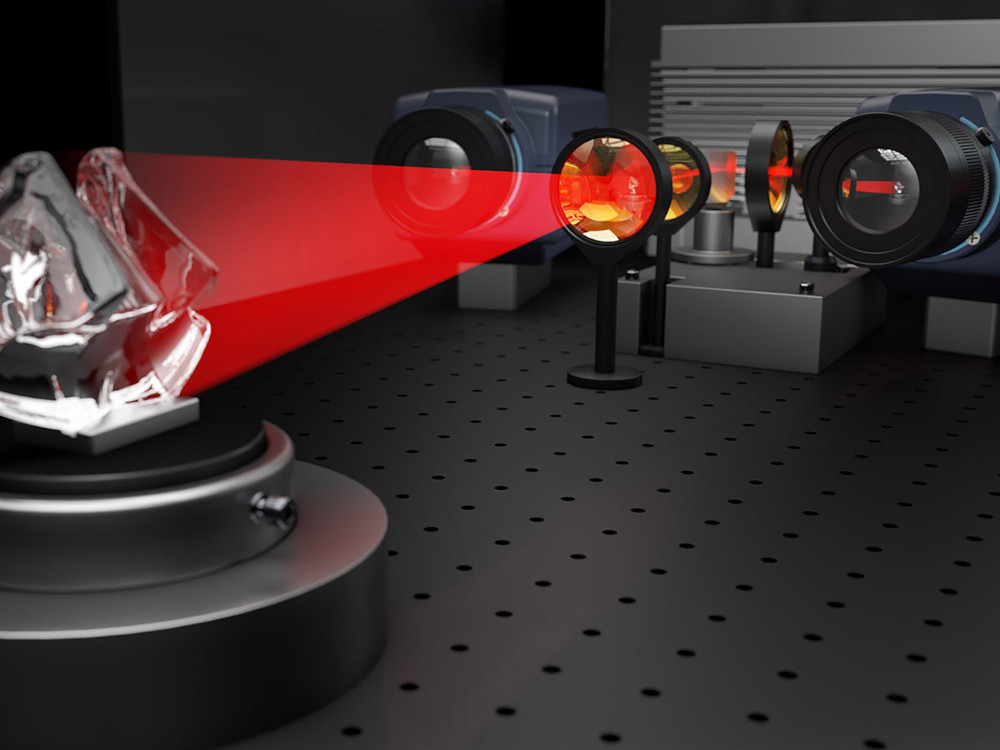
Konkret projizieren ein energiereicher CO2-Laser und ein beweglicher optischer Aufbau mit speziellen Linsen eine sich in Bruchteilen von Sekunden in mehreren Schritten über das Messobjekt bewegende Linie. Während der gesamten Messung absorbiert der zu vermessende Gegenstand die Energie des Laserlichts und emittiert sie für die zwei hochsensiblen Wärmebildkameras gut sichtbar. Eine Software wertet die Aufnahmen der thermischen Signatur aus, die der schmale Infrarotstreifen auf dem Objekt für kurze Zeit hinterlassen hat. Die zwei voneinander abweichenden Blickwinkel und den sich daraus ergebenden Versatz im aufgezeichneten Streifenmuster nutzt die Software zur Rekonstruktion der räumlichen Koordinaten. Anschließend führt sie die Daten zu den exakten Abmessungen des Messobjektes zusammen. Die für die 3-D-Analyse eingebrachte thermische Energie ist dabei so gering, dass das Objekt keinen Schaden nimmt: Der Temperaturunterschied zwischen erwärmter und nicht erwärmter Fläche liegt üblicherweise bei unter 3 °C.
Hohe Messgeschwindigkeit für großindustrielle Prozesse
In Produktionsprozessen geht es oft um Geschwindigkeit bei gleichzeitig hoher Qualität. Das Team fand die optimale Abstimmung zwischen dem nötigen Detailgrad in der Auflösung und der Dauer einer Messung. Zudem untersuchten sie verschiedene Möglichkeiten des optischen Aufbaus ihres 3-D-Sensors, um das Messfeld variabel an die jeweilige Aufgabe und den innerhalb einer Fertigungsanlage zur Verfügung stehenden Platz anzupassen. In Zusammenarbeit mit der Technischen Universität Ilmenau wurde die Datenverarbeitung ihres Messsystems optimiert. Dem Team gelang es, aus den gewonnenen Messdaten effizient die aktive Steuerung eines Roboters und seiner jeweiligen Werkzeuge abzuleiten.
Quelle und Bild: www.iof.fraunhofer.de

