
15 Mrz Ultraschall für optimales Batteriemanagement
Mit modernen zerstörungsfreien Prüfverfahren analysieren Forscher des Fraunhofer-Institut für Keramische Technologien und Systeme IKTS und der Forschungsgruppe Smart Ocean Technologies (SOT) den Batteriezustand von Unterwasser-Robotern, den Unmanned Underwater Vehicles (UUV). Derartige Unterwasserfahrzeuge sind immer häufiger und länger im Einsatz: Sie inspizieren Bohrinseln, warten Unterwassergasleitungen, suchen nach Rissen an Offshore-Windkraftanlagen, sammeln Meeresdaten oder kartografieren die Fauna und Flora am Meeresgrund. Ein besseres Batteriemanagement soll nun die Einsatzkosten senken und dafür sorgen, dass diese Unterwasser-Roboter länger tauchen können.
Mit Ultraschall den Ladezustand ermitteln
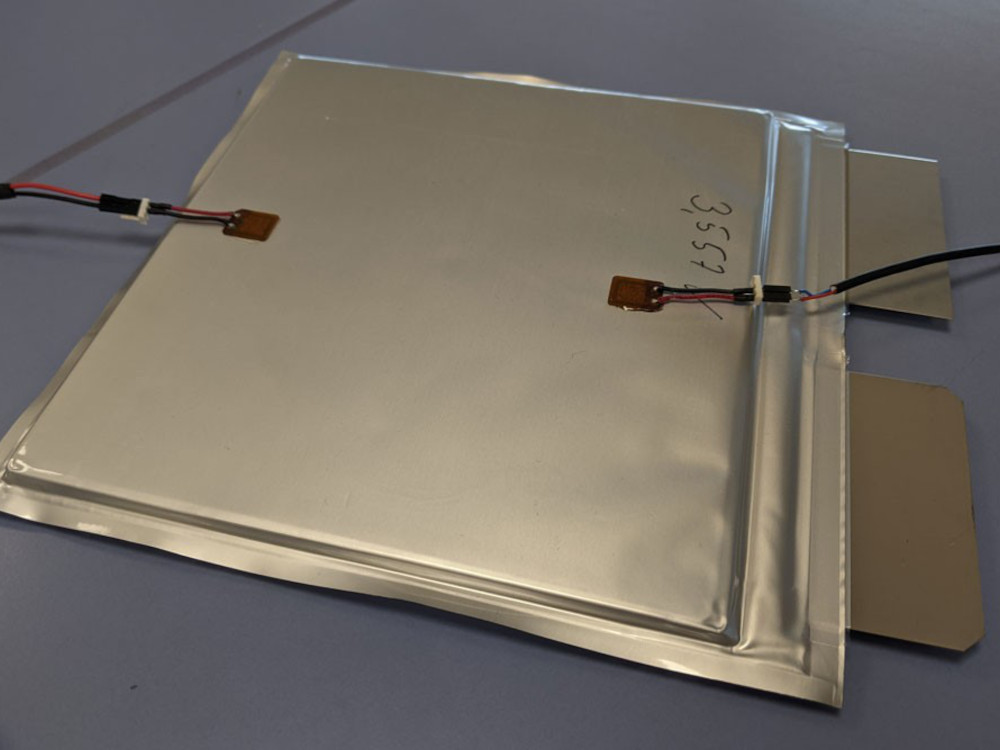
Dafür kleben die Forscher auf jede Batteriezelle kleine piezokeramische Sensoren. Sie schwingen, wenn man eine Spannung von außen anlegt. Umgekehrt wandeln sie mechanische Bewegungen in messbare elektrische Signale. Um nun den Zustand und die Entladevorgänge der einzelnen Zellen zu messen, legen die Forscher eine kleine Spannung von 5 Volt an. Dann lesen sie aus, wie gut der piezoelektrische Sensor auf der Zelloberfläche schwingt. Denn wenn sich die Zelle entlädt, verändert sich ihre Härte – und das lässt sich messen. Wenn die Untersuchung noch genauer ausfallen soll, kleben die Forscher zwei Sensoren auf jede Zelle auf. Dann können sie Ultraschall-Impulse in der Batterie hin und her wandern lassen und so klarer ermitteln, wie elastisch – sprich: wie gut aufgeladen – jede Zelle noch ist.
„Wenn es uns gelingt, die Einsatzkosten um zehn Prozent zu senken und die Tauchgänge, um ein paar Stunden zu verlängern, wäre das ein großer Fortschritt“, betont Dr. Lars Schubert, Abteilungsleiter für Zustandsüberwachung und Prüfdienstleistungen am Fraunhofer IKTS. Durch das Projekt erlangen die Forscher neue Erkenntnisse über die Entladevorgänge in der Batterie auf Zellebene und über die inneren Alterungsprozesse. Denn die Energiespeicher der Unterwasser-Roboter, wozu Remotely Operated Vehicles (ROV) und Autonomous Underwater Vehicles (AUV) gehören, müssen unter weitaus schwierigeren Bedingungen funktionieren als beispielsweise Batterien für Elektroautos: Einige UUVs können bis zu einem Kilometer tief tauchen, wo das Temperaturgefälle die Technik stark beansprucht und den Entladevorgang beeinflusst.

ROV für Tests im Unterwasserlabor des Fraunhofer SOT. Bild: Fraunhofer IKTS/SOT
Einsatzkosten für Unterwasser-Roboter senken
Ausgesetzt und ferngesteuert werden die Tauchroboter meist von Schiffen spezialisierter Dienstleister. Der damit verbundene Aufwand hat seinen Preis: Einsatzkosten um die 100 000 Dollar pro Tag und Schiff sind hier durchaus üblich. Solche Roboter-Wartungen sind jedoch unabdingbar, damit Pipelines, Offshore-Plattformen, Unterwasser-Datenkabel und andere kritische Infrastrukturen im Meer zuverlässig funktionieren. Damit diese teuren Wartungsmissionen nicht wegen leerer Batterien vorzeitig abgebrochen werden müssen, wird heute meist eine Sicherheitsreserve von zwanzig Prozent der Batteriekapazität eingerechnet. Zwar ist der Ladezustand von Batterien auch heute schon messbar – aber nur summarisch und vergleichsweise ungenau über die Spannung, Stromstärke und Temperatur der gesamten Batterie. Ein Ziel des Projekts ist es daher, die Entladung der einzelnen Energiezellen so präzise zu ermitteln, dass zukünftig nur noch zehn Prozent Batteriereserve für Tauchgänge vorgehalten werden müssen.
Quelle und Bild: www.ikts.fraunhofer.de und www.smart-ocean.fraunhofer.de

